
【導讀】機器人是典型的機電一體化數字化裝備,技術附加值高,應用范圍廣,作為先進制造業的支撐技術和信息化社會的新興產業,將對未來生產和社會發展起越來越重要的作用。以下將介紹工業機器人的基本原理、結構系統、零件設計、軸承設計。
1 工業機器人的基本工作原理
工業機器人是一種生產裝備,其基本功能是提供作業所須的運動和動力。其基本工作原理是通過操作機上各運動構件的運動,自動地實現手部作業的動作功能及技術要求。因此在基本功能及基本工作原理上,工業機器人與機床有相同之處:二者的末端執行器都有位置變化要求,而且都是通過坐標運動來實現末端執行器的位置變化要求。當然機器人也有其獨特的要求,是按關節形式運動為主,同時機器人的靈活性要求很高,其剛度、精度要求相對較低。
2 工業機器人結構系統
2.1 工業機器人構造
從功能角度分析可將機器人分解成四個部分:操作機、末端執行器、傳感系統、控制器。
操作機:是由機座、手臂和手腕、傳動機構、驅動系統等組成。其功能是使手腕具有某種工作空間,并調整手腕使末端執行器實現作業任務要求的動作。
末端執行器:也叫工業機器人的手部,它是安裝在工業機器人手腕上直接抓握工件或執行作業的部件。
感器系統:是指要機器人與人一樣有效的完成工作。必須對外界狀況進行判斷的感覺功能。與機器人控制最緊密相關的是觸覺。視覺適合于檢測對象是否存在,檢測其大概的位置、姿勢等狀態。相比之下,觸覺協助視覺,能夠檢測出對象更細微的狀態。
控制器:機器人控制系統是機器人的大腦,是決定機器人功能和性能的主要因素。主要是控制工業機器人在工作空間中的運動位置、姿態和軌跡、操作順序及動作的時間等。具有編程簡單、軟件菜單操作、友好的人機交互界面、在線操作提示和使用方便等特點。
在機器人中采用的控制系統有:點位的和輪廓的;同步的和異步的;數字的和模擬的。可根據機器人的技術與經濟要求及工藝任務的特點來選擇控制系統的具體方案。
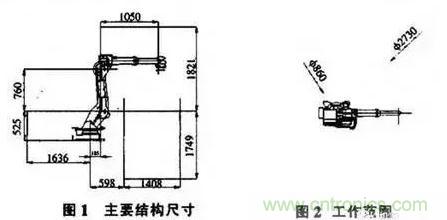
2.2 主要結構尺寸
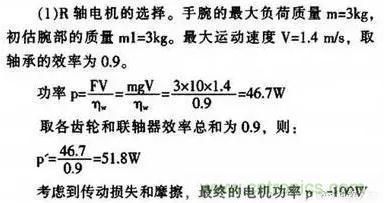
根據A II—V6L型工業機器人的主要參數進行設計。主要結構尺寸如圖I所示。機器人的工作范圍見圖2。
3 工業機器人零件設計
3.1 手腕結構的確定
手腕是聯接手臂和末端執行器的部件,其功能是在手臂和機座實現了末端執行器在作業空間的三個位置坐標(自由度)的基礎上,再由手腕來實現末端執行器在作業空間的三個姿態(方位)坐標,即實現三個旋轉自由度。通過機械接口,聯接并支承末端執行器。根據機器人的作業要求來決定其應具有的自由度數目。

3.2 基本參數的確定
確定了空間結構和手腕結構后,可確定手腕回轉、手腕擺動及手腕旋轉三個姿態的自由度。其參數見表l (參數來于SSA2000工業機器人)。
3.3 手腕電機的選擇
(1)R軸電機的選擇。選擇型號為SGMAH-0IA,額定功率為IOOW,額定轉矩為0.318N·m。額定轉速為3000rlmin,重量為0.7kg的交流伺服電動機。
(2)B軸和T軸電機的選擇。根據設計要求取相同型號的電機,選擇型號為SGMAH-01A交流伺服電動機。
3.4 傳動比的確定
3.5 諧波減速器的選擇
諧波齒輪減速器是一種新型的機械傳動變速機構。 與普通齒輪傳動相比,具有體積小,重量輕,結構簡單。它與傳動比相當的普通減速器比較,其零件減少50%。 體積和重量均減少l,3左右或更多。傳動比范圍大(單級傳動比為40~350,多級傳動比可達1600~100000),傳動效率高(單級傳動效率饑≥85%),傳動精度高。承載能力強等特點。 根據所選擇的電機,選擇型號為SGMAH—OIA,額定功率為loo W,額定轉矩為0.318 N·m,額定轉速為 3000 drain的交流伺服電動機。同時選擇XBl諧波減速機,機型為25,減速比為40,輸出力矩為1.0N·m,輸入轉速為3000 r/min。為了訂貨和維修方便,三軸均采用同一種減速器。
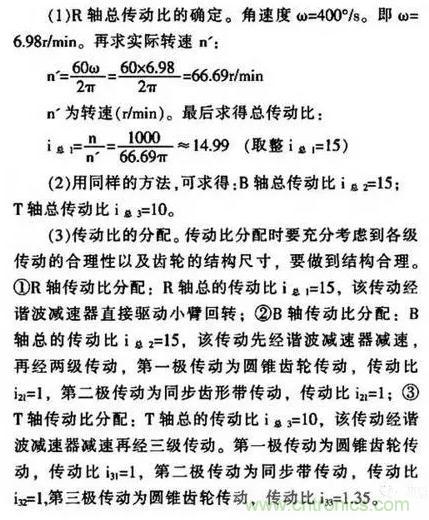
3.6 殼體的設計
機座部分采用鑄鋁材料,方形結構,臂厚5~12mm。機身部分采用鑄鋁材料,圓筒形結構,臂厚-8mm。大臂外殼采用鑄鋁材料,厚度均為6-Smm。小臂箱體和小臂外殼采用鑄鋁材料,結構為方形,側面為鑄件其它三面為鑄鋁板材。手腕外殼和手腕箱體采用鑄鋁材料,結構為方形,兩側面、背面、底面為鑄件,端面和正面為鑄鋁板材。臂厚5-8ram。其它部分具體尺寸由結構決定,見圖3。
4 機器人軸承設計
球軸承是機器人和機械手機構中最常用的軸承。它能承受徑向和軸向載荷,摩擦較小。其機器人專用軸承四點接觸式設計以及高精度加工。這種軸承比同等軸徑的常規中系列四點接觸軸承輕25倍。它的內圈(或外圈)由兩個半圈精確拼配而成,而其整體外圍(或內圈) 的溝曲率半徑較小,使鋼球與內、外圈在四個“點”上接觸。既加大了徑向負荷能力,又能以緊湊的尺寸承受很的兩個方向的軸向負荷,并且有很好的兩個方向的軸向限位能力,因為它的軸向游隙相對較小。而其接觸角 (一般取為35)又較大。工業機器人專用薄壁四點接觸球軸承通常有帶密封圈和不帶密封圈的結構形式(見圖4)。其主要由內圈、外 圍、保持架、鋼球或非接觸式密封圈組成。內、外圈均為整體結構。鋼球與內、外因溝道呈四點接觸.保持架為冠形插入式結構。

各種工業機器人可以以單機形式使用,也可以作為生產系統中的一種構成部分使用。隨著社會需求發展的變化,工業生產多品種小批量方向發展,對制造系統的柔性要求越來越高。工業機器人靈活性好,因此在柔性制造系統內各種應用越來越多。

